
Uzaktan Kumandalı Batimetri Ölçüm Aracı Kordil RC
Mayıs 2010
Kordil'in İlk Uzaktan Kumandalı Ölçüm Aracı Kordil RC ile Yapılmış Batimetrik Çalışma ve Raporu
İçerik sadeleştirilmiştir
GİRİŞ
Çalışmanın amacı, bir iskele çevresinde giriş çıkış yapan ve yapması muhtemel gemilerin seyir güvenliğidir. Batimetriyi talep eden kişi ve kuruma ilişkin iletişim bilgileri aşağıda verilmiştir. Çalışmanın yapılmasında kullanılan yöntem ve sistemler rutin yapılan batimetrik çalışmalardan biraz farklılık göstermesi münasebeti ile bu dokümanda çalışmalar ayrıtılarıyla ve şeffaf bir şekilde verilmeye çalışılmıştır. Dolayısıyla, dokümanın bir bölümünden ziyade bir bütün olarak değerlendirilmesi tafsiye edililir. Tüm çalışmalar sırasında ve de raporlama sırasında onay mercii olan SHOD’nin onay için gerekli olan tüm ayrıntılar azami ölçüde kapsanmaya çalışılmıştır.
DONANIM BİLGİLERİ.
Batimetrik Ölçme Aracı
Kordil’in kendi amaçları doğrultusunda imal ettirmiş olduğu Kordil ROV (KROV) batimetrik ölçme aracı olarak kullanılmıştır. KROV özellikle kıyı kesimlerinin ve trafiğin yoğun olduğu alanların ölçümünde kullanılan ve edüstri standardı sistemleri üzerinde barınıran mobil bir sistemdir. GPS sistemleri ile kullanılabileceği gibi, çok hassas ölçümlerde robotik (auto-focus/locking) total-sataionlar ile beraber de kullanılmaktadır.

KROV uzaktan kumandası ve yüksek manevra kabiliyeti ile dara alanaların ölçümünde.
KROV aşağıdaki ekipmanları içermektedir.
Topcon GRS-1 GNSS Reciever
Ohmex SonarM8/Mite Singlebeam Echosounder
Sony VAIO Bilgisayar
KROV’un iç görünüşü, kalemin üzerinde olduğu cihaz Topcon GRS1, solundaki Ohmex SonarM8, en solda da Sony Vaio P Serisi Bilgisayar.

KROV’un arkadan görünüşü. Orta altta SonarM8 transduceri görünmektedir.
İskandil Sistemi
Ohmex SonarMite/M8 sistemi 235 KHz frekansında digital bir echosounder olup 75m ye kadar olan derinliklerde kullanılabilinen ve akıllı transducer ve bottom tracking özelliği sayesinde derinlikler digital olarak RS232 veya Bluetooth portu üzerinden kalite notu ile beraber dışarıya atan ve IHO standardlarının karşılayan bir echosounder dir.
Konumlandırma
Topcon GRS-1 GNSS sistemi L1 ve L2 bandlarını kullanan, EGNOS, WAAS düzeltmelerini ile de DGPS özelliğine sahip mobil ve hassas bir konumlandırma sistemidir.
Ses in yayılım hızı
AML Oceanographic ses hızı ölçüm cihazı kullanılmıştır.
Veri toplama
Veri toplama için bot üzerlnde bulunan Sony VAIO P serisi notebook kullanılmıştır. Bunun ile ilgili teknik detay vermeye gerek görülmemiştir.
ÖLÇME
Ofsetler
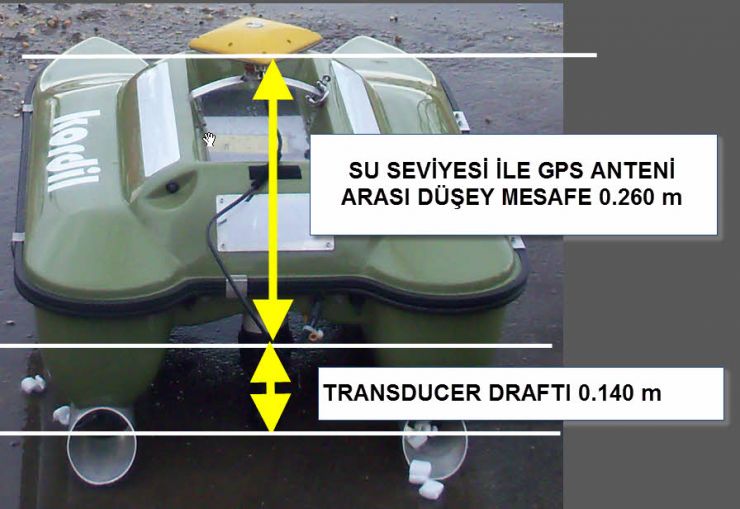
KROV üzerinde bulunan GPS anteni, su seviyesi ve echosounder transduceri arasıdaki düşey mesafeler alttaki resimde verilmiştir.
Hat Aralıkları
Ölçümler için hat aralıkları 10 metre olacak şeklide tasarlanmıştır ve azami ölçüde 10m den daha geniş aralık bırakılmamaya özen gösterilmiş olup bir çok alanda daha fazla yoğunlukta ölçümler yapılmıştır.
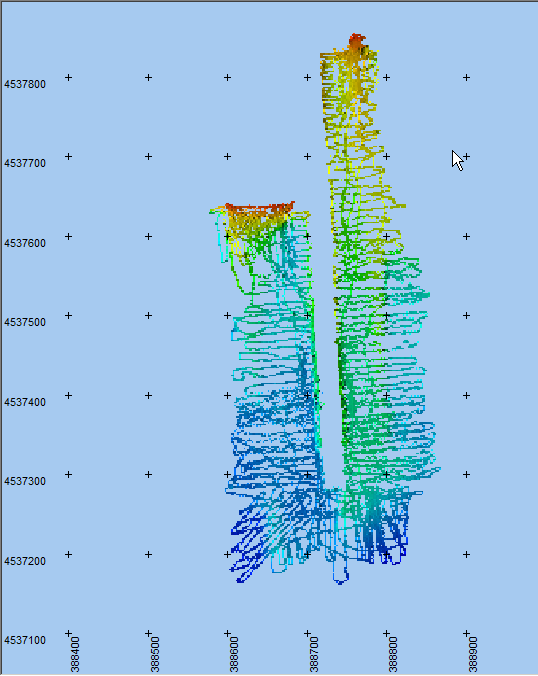
PDS2000 DTM editörüne yüklenmiş nihayi noktalar. Ölçülen hatlar da ayrıt edilebilmektedir. Cyan renkli çizgi ise sınır çizgisidir.
Ölçme Yöntemi
Tüm ölçümler sırasınsa Topcon GRS – 1 DGPS özelliği ile Kullanılmış olup olası kesintileri teleafi etmek için de 1 saniye aralık GPS antenine ait ham veriler de eş zamanlı olarak kayıtta bırakılmıştır. CORS-TR nin kullanılmamasının nedeni DGPS sisteminin daha kesintisiz veri sağlaması münasebeti iledir. Çalışmanın son günü (03/05/2011), liman içerisinde bulunan bir geminin tutmuş olduğu alanın ve eksik kalan bir kaç yerin ölçümü için CORS-TR sistemi kullanılarak RTK ile ölçülmüştür.
Toplanan ham veriler ortalama anten yüksekiğinin hesaplanmasında dolayısıyla, teorik olarak anten yüksekliği suyun sabit üzerinde sabit bir mesafede olması münasebeti ile tide yükesekliğinin hesaplanmasında da kullanılmıştır. Lokal hatalar verinin stabilitesine ve kalitesine bakılarak en kaliteli veriler seçilip tide yüksekliği hesaplanmıştır.
Seyir hatları iskeleler üzerinde halihazırda işaretli bulunan 10m mesafeler ve karşı iskeleler kullanılarak kerteriz alınarak takip edilmiştir. Eksik kalan bölgeler daha sonra yama yapılarak ölçülmüştür.
Hem echosounderden gelen hem de SonarMite den gelen veriler eş zamanlı olarak 1/1000 saniye (milisaniye) hassasiyetinde zaman etiketi ile beraber birbirinden bağımsız olarak kaydedilerek daha sonra işlenmek üzere toplanmışlardır. Eş zamanlı veriler Kordil Navigation Pro yazılımı ile toplanmıştır.
Kordil Navigation Pro kendi içerisinde terminal emülatörü barındırarak, seri port üzerinden gelen verilerin geldiği zamanı yüksek hız ve çözünürlükte milisaniye mertebesinde zaman bilgisi ile etiketleyip veriyi kaydeder. Aynı zamanda, Datum ve Transverse Mercator sistemleri ile ve de projeksiyon olmaksızın navigasyon ekranı ve seyir hatları, seyir için konumsal ve hız verileri gibi temel bilgileri de eş zamanlı olarak ekrana dökerek, bir navigasyon sisteminden beklenen tüm temel özellikleri kullanıcıya sağlar. Dolayısıyla üzerinden geçilen hatlar işaretlenir ve bot karaya alındığında atlanan veya kapsanmayan alanlar tespit edilebilmektedir.
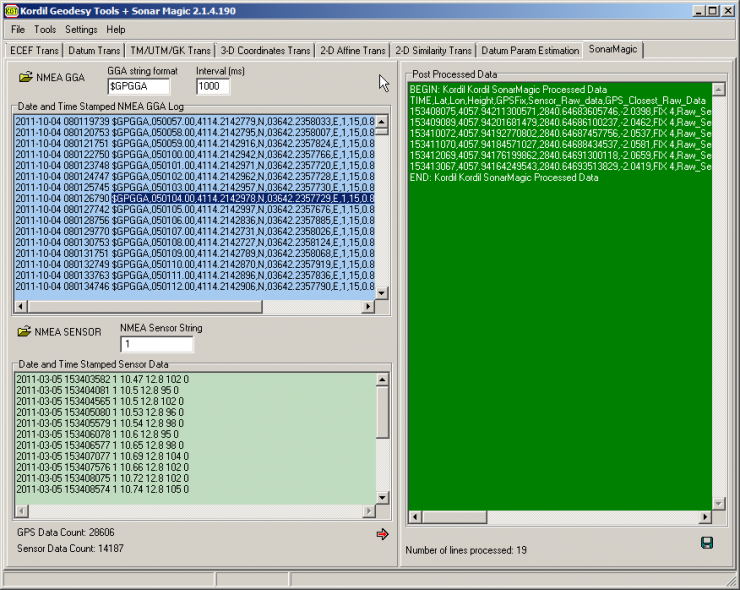
Aşağıda SonarM8 ile GPS den gelen verilerin nasıl kaydedildiklerine ilişkin çalışmadan alınmış örnek veeriler vardır. Zaman bazlı bu veriler daha sonra Kordil SonarMagic ile process edilerek ham veri formatına dönüştürülmüştür.
SonarM8 Veri Formatı
Açıklamalardaki renklendirmeler verideki renkler ile özdeş oldukları anlamına gelmektedir. Verler son güne ait ölçümlerden alınmıştır ve gerçektirler.
- Tarih (YYYY-MM-DD)
- Zaman (HHMMSSFFF)
- Sensor Numarası
- Transducerin atındaki derinlik
- Pil/Akü voltajı
- Veri kalite notu
- Boş
2011-03-05 153403582 1 10.47 12.8 102 0
2011-03-05 153404081 1 10.5 12.8 95 0
2011-03-05 153404565 1 10.5 12.8 102 0
2011-03-05 153405080 1 10.53 12.8 96 0
2011-03-05 153405579 1 10.54 12.8 98 0
2011-03-05 153406078 1 10.6 12.8 95 0
2011-03-05 153406577 1 10.65 12.8 98 0
2011-03-05 153407077 1 10.69 12.8 104 0
2011-03-05 153407576 1 10.66 12.8 102 0
2011-03-05 153408075 1 10.72 12.8 102 0
2011-03-05 153408574 1 10.74 12.8 105 0
2011-03-05 153409089 1 10.77 12.8 99 0
2011-03-05 153409573 1 10.77 12.8 103 0
2011-03-05 153410072 1 10.78 12.8 103 0
2011-03-05 153410587 1 10.78 12.8 95 0
2011-03-05 153411070 1 10.78 12.8 102 0
2011-03-05 153411585 1 10.8 12.8 99 0
2011-03-05 153412069 1 10.8 12.7 102 0
2011-03-05 153412568 1 10.8 12.8 98 0
2011-03-05 153413067 1 10.83 12.8 101 0
2011-03-05 153413582 1 10.9 12.8 100 0
NMEA GGA Mesajı
Açıklamalardaki renklendirmeler verideki renkler ile özdeş oldukları anlamına gelmektedir.
Tarih (YYYY-MM-DD)
Zaman (HHMMSSFFF)
NMEA GGA Mesajı
2011-03-05 153407092 $GPGGA,123346.00,4057.9422178,N,02840.6468273,E,4,10,1.26,-2.0301,M,39.4704,M,2.0,0206*55
2011-03-05 153408091 $GPGGA,123347.00,4057.9421113,N,02840.6468362,E,4,10,1.26,-2.0495,M,39.4704,M,2.0,0206*51
2011-03-05 153409105 $GPGGA,123348.00,4057.9420153,N,02840.6468614,E,4,10,1.46,-2.0429,M,39.4704,M,1.0,0206*5D
2011-03-05 153410103 $GPGGA,123349.00,4057.9419249,N,02840.6468750,E,4,10,1.46,-2.0645,M,39.4704,M,2.0,0206*54
2011-03-05 153411086 $GPGGA,123350.00,4057.9418444,N,02840.6468845,E,4,10,1.26,-2.0517,M,39.4704,M,1.0,0206*5C
2011-03-05 153412100 $GPGGA,123351.00,4057.9417594,N,02840.6469139,E,4,10,1.26,-2.0801,M,39.4704,M,1.0,0206*57
2011-03-05 153413129 $GPGGA,123352.00,4057.9416350,N,02840.6469365,E,4,10,1.61,-2.0037,M,39.4704,M,1.0,0206*5E
VERİ İŞLEME
SAYISAL VERİLER HAKKINDA
EK-2 de verilen sayısal veriler işlem sırasına göre numaralandırılmış olup aşağıdaki işlemlerden geçirilmişlerdir.
GPS verilerinde düzeltme alınmamış tüm veriler ve de en az 5 uydu ve 15 derece yataydan maskeleme kriteri uygulanmıştır.
Derinlik değerleri SonarM8’in kalite notu filtresine tabi tutularak 50 ve üzeri kalite notuna sahip değerler bırakılmıştır. Ayrıca ardışık değerler teker teker incelenered ve komşu (bir önceki ve bir sonraki) değerlerden olan standard sapmalara ve genel trende bakılarak tüm veri gözden geçirilmiş ve olası bozuk veriler ayıklanmıştır. Sesin sudaki yayılım hızının ölçümü sonuçlarına göre tüm derinliklere hız düzeltmesi yapılmıştır. Çalışmanın son günü yapılan ses hızı ölçümlerinde ölçülen hız değeri 1484 m/sn dir.
Derinlikler su seviyesi yüksekliğine bağlı olarak TUTGA datumuna indirgenmiştir.
Zaman etiketli veriler, zaman ortak parametresi ile Kordil SonarMagic ile işlenerek deriniğin okunduğu andaki konumsal veriler hesaplanmıştır.
Temizlenen veri sonrasında ve Enlem, Boylam ve datuma indirgenmiş Derinlik değerleri sade haliyle bıraklılmıştır.
Koordinatlar TM Prjeksiyonuna dönüştürlerek nihayi haritayı yapmak üzere saklanmıştır.
Tarih ve zaman verisi bulunan XYZ verisi PDS2000 programına import edilerek profiller incelenerek bozuk veriler atılmıştır. Akabinde de düzenlenmiş profiller PDS2000 plot modülü ile 10 m lik aralıklarla SHOD standarlarına uygun olarak kotlandırılmıştır.
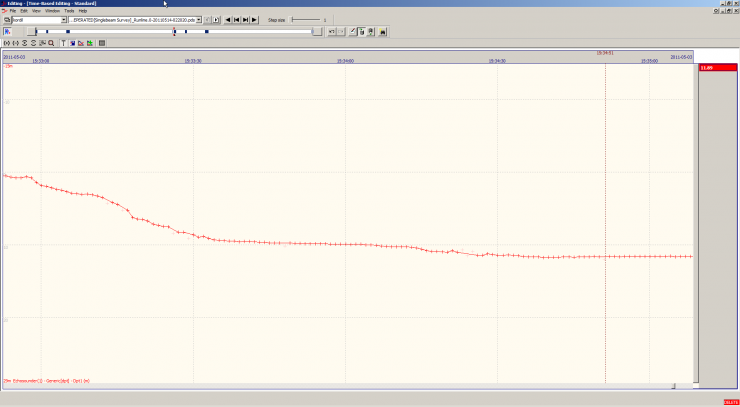
PDS2000 yazılımına import edilmiş profiller
YAZILIM
Veri işleme sırasında aşağıdaki yazılımlar kullanılmıştır.
Kordil Geodesy Tools + SonarMagic: İskandil tekniğinin ve endüstri standardı yazılımların kullandığı aynı prensip ile çalışan bir koordinat ve veri işleme yazılımıdır. Yazılım aslen Echosounderler için kullanılmakta olup farklı sensörler için de kullanılabilmektedir. Çalışma prensibi, echosounder (veya farklı cihazlar) verisinin alındığı anda konumsal veriyi de zaman ortak parametresi ile hesaplayarak koordinat çıktısı olarak vermesidir.
PDS2000: Hidrografik ölçme ve değerlendirme yazılımı
Topcon Tools: GPS post processing yazılımı
BEGIN: Kordil Kordil SonarMagic Processed Data
TIME,Lat,Lon,Height,GPSFix,Sensor_Raw_data,GPS_Closest_Raw_Data
153408075,4057.94211300571,2840.64683605746,-2.0398,FIX 4,Raw_Sensor_Begin->,2011-03-05 153408075 1 10.72 12.8 102 0,<-Raw_Sensor_End,Raw_GPS_Begin->,2011-03-05 153408091 $GPGGA,123347.00,4057.9421113,N,02840.6468362,E,4,10,1.26,-2.0495,M,39.4704,M,2.0,0206*51,<-Raw_GPS_End
153409089,4057.94201681479,2840.64686100237,-2.0462,FIX 4,Raw_Sensor_Begin->,2011-03-05 153409089 1 10.77 12.8 99 0,<-Raw_Sensor_End,Raw_GPS_Begin->,2011-03-05 153409105 $GPGGA,123348.00,4057.9420153,N,02840.6468614,E,4,10,1.46,-2.0429,M,39.4704,M,1.0,0206*5D,<-Raw_GPS_End
153410072,4057.94192770802,2840.64687457756,-2.0537,FIX 4,Raw_Sensor_Begin->,2011-03-05 153410072 1 10.78 12.8 103 0,<-Raw_Sensor_End,Raw_GPS_Begin->,2011-03-05 153410103 $GPGGA,123349.00,4057.9419249,N,02840.6468750,E,4,10,1.46,-2.0645,M,39.4704,M,2.0,0206*54,<-Raw_GPS_End
153411070,4057.94184571027,2840.64688434537,-2.0581,FIX 4,Raw_Sensor_Begin->,2011-03-05 153411070 1 10.78 12.8 102 0,<-Raw_Sensor_End,Raw_GPS_Begin->,2011-03-05 153411086 $GPGGA,123350.00,4057.9418444,N,02840.6468845,E,4,10,1.26,-2.0517,M,39.4704,M,1.0,0206*5C,<-Raw_GPS_End
153412069,4057.94176199862,2840.64691300118,-2.0659,FIX 4,Raw_Sensor_Begin->,2011-03-05 153412069 1 10.8 12.7 102 0,<-Raw_Sensor_End,Raw_GPS_Begin->,2011-03-05 153412100 $GPGGA,123351.00,4057.9417594,N,02840.6469139,E,4,10,1.26,-2.0801,M,39.4704,M,1.0,0206*57,<-Raw_GPS_End
153413067,4057.94164249543,2840.64693513829,-2.0419,FIX 4,Raw_Sensor_Begin->,2011-03-05 153413067 1 10.83 12.8 101 0,<-Raw_Sensor_End,Raw_GPS_Begin->,2011-03-05 153413129 $GPGGA,123352.00,4057.9416350,N,02840.6469365,E,4,10,1.61,-2.0037,M,39.4704,M,1.0,0206*5E,<-Raw_GPS_End
END: Kordil Kordil SonarMagic Processed Data
Kırmızı satırlar, GGA Mesajından, sonar verislinin alındığı zamana ait lineer enterpolasyon ile hesaplanmış koordinat verisi. Görsel kontrol amaçlı ve kaba hatalara karşı kontrol edilmek üzere de zaman olarak en yakın GGA mesajı da aynı satırda tutulmaktadır. Derinlik verisine karşılık gelen ve konumsal verinin frekansına yakın zaman mesafesinde bulunmayan tüm derinlik verileri hesap dışı bırakılarak atılırlar. Hesaplanan koordinatların kontrolü ve üçüncü şahıslar tarafından denetimi için de hem, GPS verisinin frekansına uygun aralıkta en yakın koordinat bilgisi de satır sonmuna eklenerek bir nevi güven denetimi sağlanır. Bu da, derinlik verisinin alındığı andaki, hiç enterpolasyona tabi tutulmamış ve aynı süre zarfına denk gelen en yakın GPS verisinin aynı satıra eklenmesi ile yapılmıştır.
Zaman etiketi ile toplanan veriler Kordil Sonar Magic yazılımı ile birleştirilerek gerekli hız, ofset ve tide düzeltmeleri Excel de yapılarak düzenlenmiştir.
Elde edilen XYZ veriler PDS2000 ile post processinge tabi tutularak yeniden düzenlenerek nihayi harita yapılmıştır.
Ham verilere aşağıdaki kriterler uygulanmıştır:
DGPS veya RTK olmayan tüm konum verileri işleme sokulmamışş olup atılmışlardır.
Derinik ölçümlerinde düzensiz seyreden ve kalite notu 50 nin altına düşen veriler ayıklanmıştır.
Komşu okumalarda 0.20 cm standart sapma kriteri uygulanarak bir önceki ve bir sonrakiden 20 sm den fazla standard sapan veriler ekstra incelemeye tabi tutularak yorumlanarak ya atılmıştır ya da plan haritasında çapraz hatlar ile beraber incelenmek üzere bırakılmıştır.
Hem profilde hem de planda (yükseklik eğrileri ile beraber) düzenlenen kotlar incelenerek, düzenlenmiş yüzey 5 m lik grid karelajına indirgenerek nihayi harita yapılmıştır.
Nihayi koordinatlar, plan haritasında 10 cm yükseklik eğrileri geçirilerek yeniden denetlenmiş ve gerekli nokta yoğunluğuna sahip olmayan şüpheli veriler de atılmışlardır.
Hiç bir yumuşatmaya tabi tutulmayan Nihayi koordinatlar PDS2000 1 m x 1 m lik grid editörüne yüklenerek ve üç boyutlu olarak incelenerek olası gerçekçi olmayan durumlar tespit edilmeye çalışılmıştır. Ancak veride kayda değer ve atılması gerekli bir veriye rastlanmamıştır.
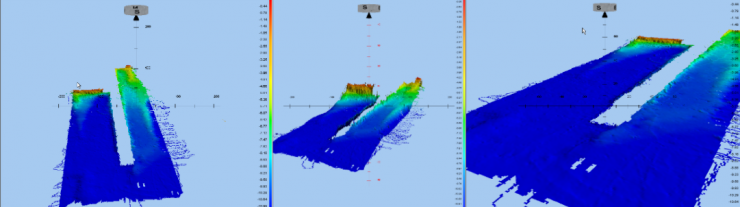
Batimeri verisinin 3 boyutlu değişik açılardan görüntüsü. Yükseklikler 5 kat büyütülmüştür. Resimde de görüleceği üzere yüzey gayet düzgün olarak çıkmıştır. Aynı verinin düşey ölçek faktörü uygulanmamış hali
SHOD rapor formatına uygun olarak hatlar boyunca seçilen ve ölçülere ait orjinal noktalar kotlandırılarak da nihayi değer olarak batimetrik haritada gösterilmiştir.
KOORDİNAT SİSTEMİ
Yatay Başlangıç Datumu: WGS-84
KONTROL NOKTALARI
GNSS alıcısı ile toplanan verşler aşağıdaki en yakın CORS-TR noktalar kullanılarak işlenmiştir. Noktaların koordinatları http://212.156.70.42/ adresinden “k*****” kullanıcı adı ile giriş yapılarak indirilen RINEX dosyalarının header kısmından alınmıştır.
Noktaların Kartezyen (Earth Centered Earth Fixed) koordinatları (X Y Z)
KABR 4206855.6823 2301542.2908 4191502.3219
ISTN 4223661.0695 2325014.9869 4161716.1471
Noktaların Coğrafi Koordinatlara Dönüştürülmüş Koordinatları
Nokta Adı, Enlem, Boylam ve Elipsoidal Yükseklik olarak aşağıdaki gibidir.
KABR 41o 20’ 49.6262’’ 28 o 40’ 57.9755’’ 93.613 m
ISTN 40 o 59’ 27.4612’’ 28 o 49’ 53.8823’’ 77.066 m
Düşey başlangıç datumu: GNSS anteni kotu tüm ölçümler sırasında kaydedilerek ortalama deniz seviyesi kotu çalışma süresince 1 er saatlik ortalama olarak WGS-84 Ellipsoidine bağlı olarak hesaplanmıştır. Hesaplanan elipsoidal kot değerleri, Harita Genel Komutanlığı’na bağlı ilgili makamdan resmen talep ve tedarik edilen Geoid yüksekliği değeri kullanılarak harita datumuna indirgenmiştir. Hesaplanan su seviyesi kotunun kontrolü için yine Harita Genel Komutanlığ’ndan talep edilen en yakın istasyona ait tide verileri ile karşılaştırılmış olup tide ölçüm kalitesi yöntemi ispatlanmış veya kontrol edilmiş oldu. Harita Genel Komutanlığı’ndan tedarik edilen ve Karaburun’a ait tide verileri hesaplanan tide verileri ile karşılaştırıldığında gayet makul farklar çıkmakta ve hesaplanan tide verilerinin güvenilir olduğunu ispatlamaktadır.
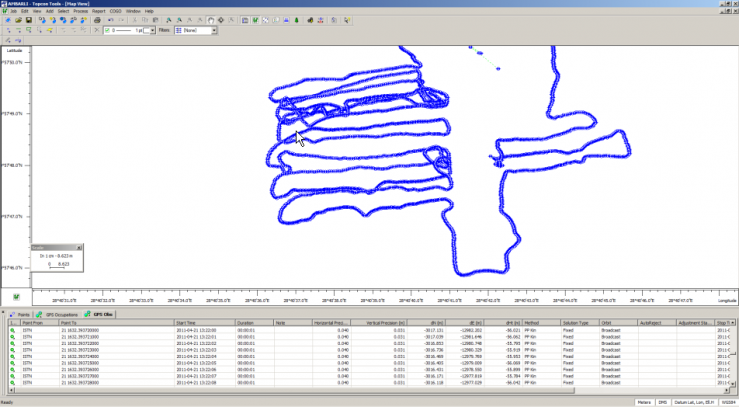
Tüm GPS anteni seviyeleri Topcon Tools Post Processing yazılımı ile yapılmıştır. Alttaki görüntüde, post processig ile hesaplanmış ger bir EPOC’a ait verilerin hesaplandıgı dengelenmiş noktalar vardır. Bunlara ilişkin hesap tabloları EK G de verilmiştir.
Not: 23 Mart 2011 tarihinde RINEX verilerinde yarım günlük bir kayıp sözkonusu olduğu için bu kayıp zamanın telafisi için ISKI nin kullandığu UKBS sisteminden RINEX verileri serbest dengelemeye sokularak kinematik veriler çözümlenmiştir. İlgili veriler elektronik ortamda sunulmuştur.
İŞLENMEMİŞ HAM VERİLER
Ham veriler ilgili ekte elektronik ortamda verilmiştir ve aşağıdakilerden oluşmaktadır.
Relatime olarak kaydedilen gün bazında GPS ve Echosounder verileri
CORS Sisteminden eşzamanlı indirilen statik veriler ile bot üzerinde bulunan GNSS alıcısı ile toplanan statik veriler.
ÖLÇÜLERİN KALİTE KONTROLÜ
Tüm ölçümler ve değerlendirmeler sırasında aşağıdaki kontroller ölçümlerin kalitesinin dentetim altında tutulması için yerine getirilmiştir.
Gün boyunca yapılan paralel hatların ölçümü sırasında bu hatları dikine kesen bir hat gidilerek deniz tabanında birbirine yakın noktalar incelenmiş ve değişim makul seviyede bulunmuştur.
Farklı günlerde yapılan batimetrilerde önceki alanlar üzerinde de ekstra ölçümler alınarak kesişen hatlar incelenerek tide veya derinik okumalarından kaynaklı olası hataların varlığına yönelik yakın noktalarda kontroller yapıldı ve gerçekçi olmayan veya makul kabül olmayan bir sapmaya rastlanmamıştır.
Post Processing ile hesaplanan ve referans datumuna indirgenen su seviyesi kotları Harita Genel Komutanlığından tedarik edilen Karaburun İstasyonu verileri ile karşılaştırılmış olup kayda değer bir fark gözlenmemiştir. Karaburun mevkiinin yaklaşık 70 km mesafede olması münasebeti ile ölçülen ve hesaplanan tide verileri daha güvenilir kabul edilmiş ve hesaplamalarda kullanılmıştır.
Verilerin 3. Şahıslar tarafından denetimi ve kontrolü amacı ile de aşağıda resimle ile gösterilmiş iskele babasının koordinatları okunarak kayıt altına alınmıştır. İskele babasının yeri ve koordinatları aşağıdadır. Bu nokta CORS TR Sistemine bağlı olarak RTK Fixed modunda 200 epoc (200 saniye) ortalama alınarak ölçülmüştür. Koordinat sistemi WGS-84 tür.
Enlem: ** **’ **.***’’ N
Boylam: ** **’ **.***’’ E
Elipsoidal Yükseklik: **.**m
Helmert Ortometrik Yükseklik: 39.821 – 36.581 = 3.24 m (36.581 değeri Harita Genel Komutanlığı tarafından sağlanan jeoid ondülasyonu değeridir).

PERSONEL
Tüm ölçüm ve değerlendirme çalışmalar aşağıdaki personel ile beraber yürütülmüştür
HK (Jeodezi ve Fotogrametri Mühendisi), Yıldız Teknik Üniversitesi, 1995 mezunu
Mezuniyetinden sonra fotogrametri ve jeodezik ölçümlerin yanısıra, 2001 yılından bu yana hidrografik ölçme alanının hemen her kademesinde ve dünyanın sayılı firmalarının büyük deniz projelerinde çalışmalarda bulunmuş ve aktif olarak 9 yıl deniz ve sualtı çalışmaları deneyime sahiptir. Son bir yıldan beri de muhtelif su altı ölçüm ve araştırmaları çalışmalarını Kordil altında yürütmektedir. Özgeçmişi ektedir.
MS (Harita Kadastro Teknikeri), Bursa Uludağ Üniversitesi, 2009 mezunu
Kara ölçümlerinde yeterli bilgi ve tecrübeye sahip olup, kayda değer bir hidrografik ölçme tecrübesine sahip değildir.
EKLER
EK A Batimetrik Haritalar
EK B Kaynak Bilgileri
Harita Genel Komutanlığı Jeoit Yüksekliği
Kontrol amaçlı Karaburun istasyonuna ait ve Harita Genel Komutanlığı’ndan tedarik edilen su seviyesi verileri. Çalışmalar sırasında rüzgarın kuzeyden güneye doğru olması münasebeti ile Karaburun istasyonu, daha uzakta olmasına rağmen Yalova istasyonuna tercih edilmiştir. Kayıtlar email yolu ile tedarik edilmiş olunup EK
Cihaz ve sistemlerin teknik özellikleri
Topcon GRS-1 GNSS reciever
Ohmex SonarM8/Mite Echosounder
AML SmartSVP Sound Velocity Profiler
EK Ç Çalışma fotografları ve filmleri
Çalışma fotoğrafları
Çalışma filmleri
EK D Yatay kontrol noktası belge ve bilgileri
CORS TR Sanal RTK Ağı ve EGNOSS DGPS sinyalleri kullanıldığından ilave yatay kontrol noktası kullanılmamıştır.
EK E Düşey kontrol noktası beklge ve bilgileri
Düşey nivelman noktası kullanılmamıştır. Bunun yerine CORS TR Noktaları ile Harita Genel Komutanlığından tedarik edilen Jeoit yüksekliği kullanılmıştır. Ham GNSS verileri post-processing e tabi tutularak GPS anten yüksekliği hesaplanmıştır ve GNSS antenini su üzerinde bulunan mesafesi kullanılarak tide yüksekliği hesaplanmıştır.
EK F Nivelman kayıt çizelgesi
Yöntem kullanılmadığı için yoktur
EK G Eşel Sayısal Maregraf Kurulum Krokisi
Eşel kullanılmadığı için yoktur
EK Ğ Su seviyesi kayıt çizelgesi
Gün ve saat bazında hesaplanan düşey datuma indirgenmiş su seviyesi ve echosounder transduceri yükseklikleri.
EK H Eğitim Belgeleri
Diploma ve Özgeçmiş
EK I İmza Beyannameleri
Kopyaları ekte olup orjinalleri deklere edilmiştir
EK İ Sayısal Veriler
KROV Ham veri dosyası
Kalite kriterlerine göre temizlenmiş ham veriler
Derinliklere hız düzeltmesi yapılmış ham veriler
TUDKA datumuna indirgenmiş ve ayıklanmış derinlik verileri
Birleştirilmiş GNSS ve Echosounder Ham çıktısı
Okunan noktaların coğrafi koordinatları ve yükseklikleri
Okunan noktaların TM (Gauss Kruger) Projeksiyonunda koordinatları